Shengnan Ke, Shibin Li, Jun Gong, Lingxiang Liu,Jianjun Luo, Bin Wang, Shengjun Tang*
Automation in Construction, 2026
负责人 (PI): 汤圣君 副教授/特聘研究员
🎓 本科及博士毕业于武汉大学。
🔬 曾于香港理工大学(LSGI)担任研究助理,后跟随郭仁忠院士于深圳大学从事博士后研究。

🚀 主要研究方向: 城市三维重建 | 点云理解 | 激光 & 视觉 SLAM
💡 招生要求: 对机器视觉、三维场景理解、多模态学习充满热情,具备扎实的编程与数学基础,渴望在前沿学术研究与实际应用中挑战自我。
📢 加入我们,在深圳大学共同探索三维空间的无限可能!
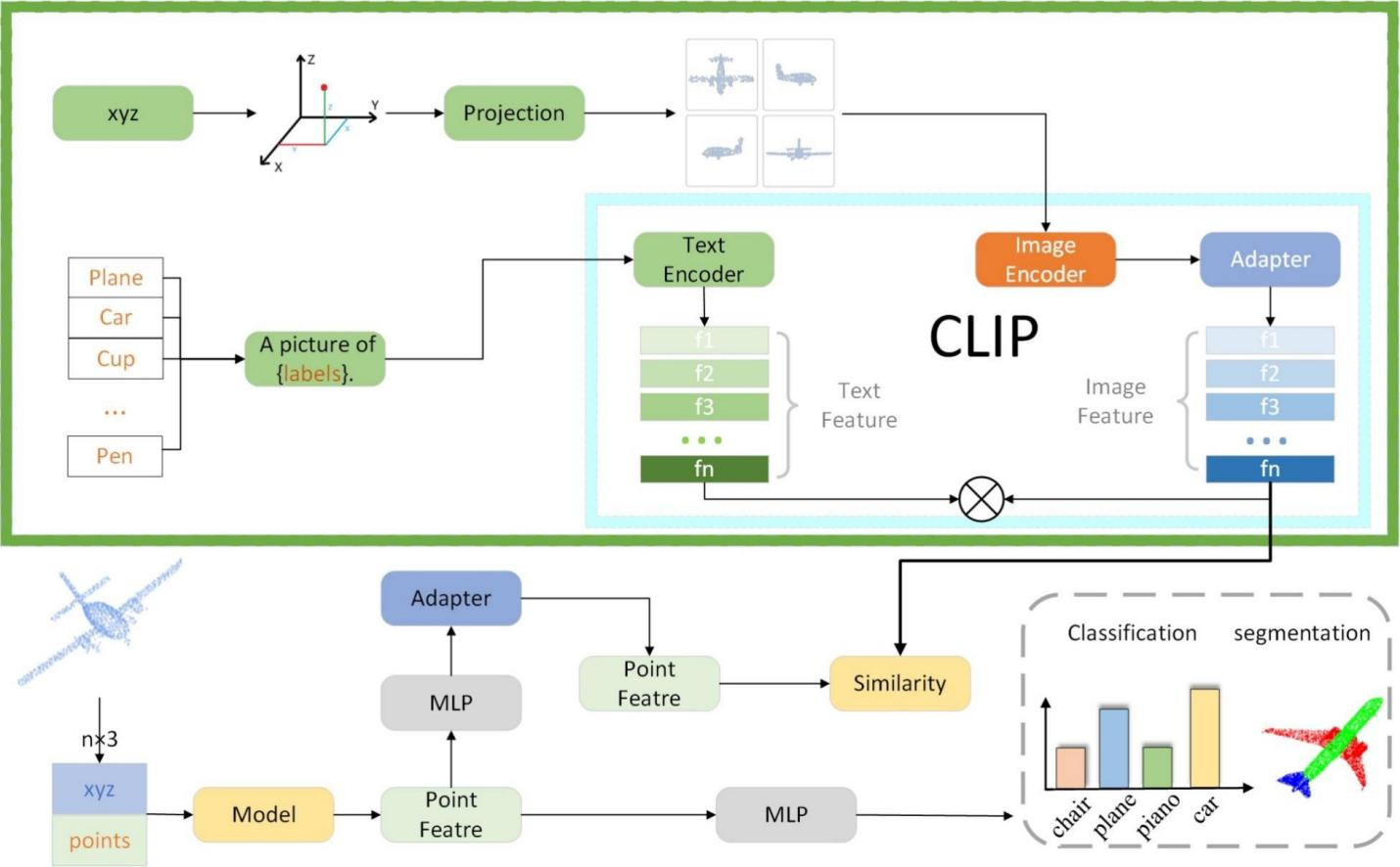
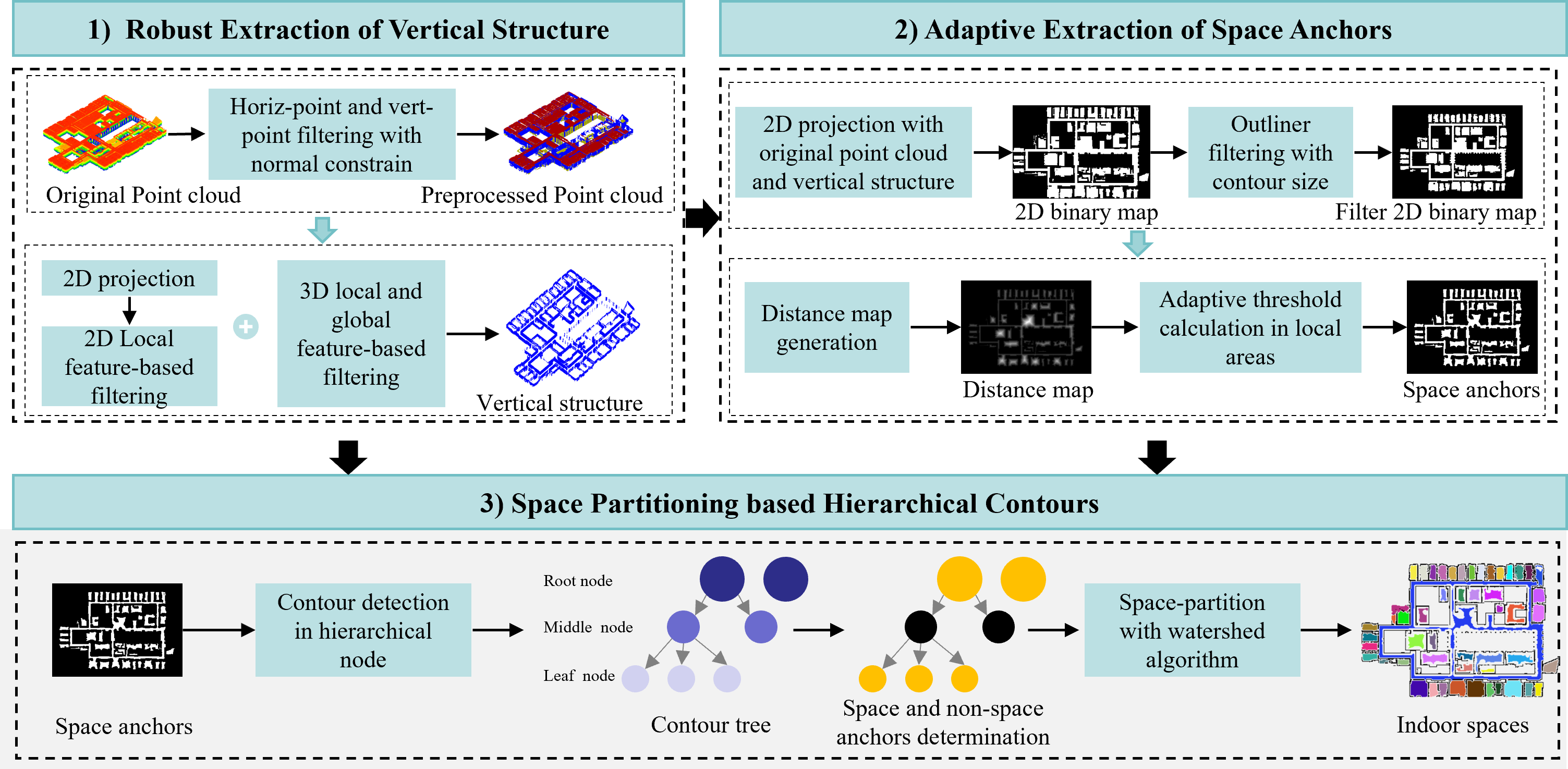
Shengnan Ke, Shibin Li, Jun Gong, Lingxiang Liu,Jianjun Luo, Bin Wang, Shengjun Tang*
Automation in Construction, 2026
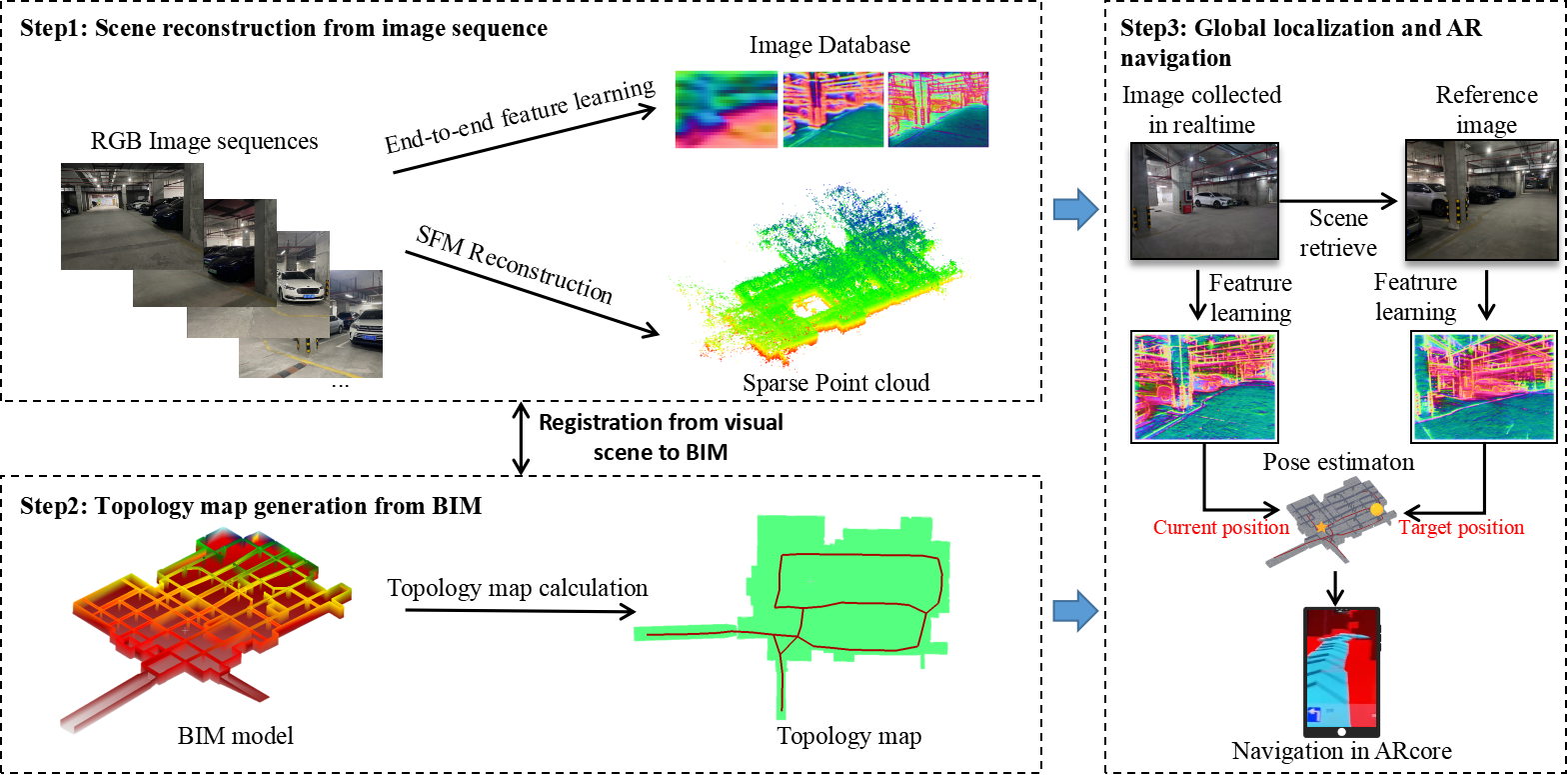
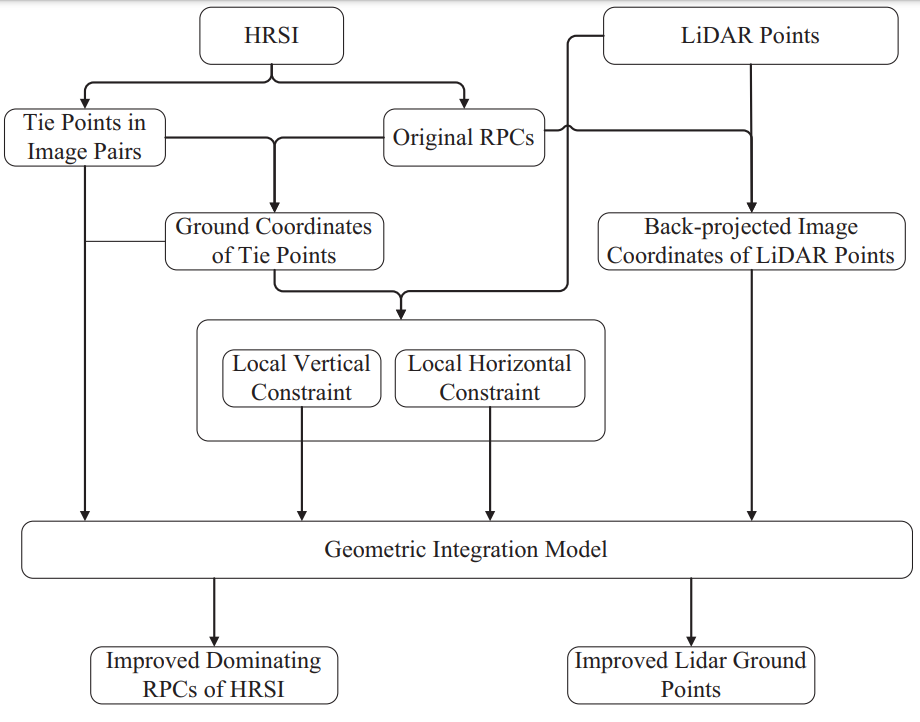
Weixi Wang, Yuxuan Wu, Sen Jia, Linfu Xie, Renzhong Guo, Shengjun Tang*
IEEE Transactions on Geoscience and Remote Sensing, 2025
Shengjun Tang, Xiping Xie,Yusong Li, Zhihan Lv, Renzhong Guo, Weixi Wang
IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2025
Shengjun Tang, Yujie Chen, Tian Yu, You Li, Linfu Xie, Weixi Wang, Renzhong Guo
Photogrammetric Engineering & Remote Sensing, 2025
Jiaxin Jiang, Jun Gong, Shengnan Ke, Xiaoming Li, Zhigang Zhao, Jianjun Luo, Shengjun Tang*
Photogrammetric Record, 2025
Shengjun Tang, Jiawei Wan, Yusong, Li, Hongsheng Huang, Weixi Wang, Renzhong Guo, Yunjie Zhang
Transactions In Gis, 2025
You Li, Rui Li, Ziwei Li, Renzhong Guo, Shengjun Tang*
International Journal of Applied Earth Observation and Geoinformation, 2025
Shengjun Tang, Junjie Huang, Benhe Cai, Han Du, Baoding Zhou, Zhigang Zhao, You Li, Weixi Wang
International Journal of Applied Earth Observation and Geoinformation, 2024
Shengjun Tang, Zhuoyu Ao, Yaoyu Li, Hongsheng Huang, Linfu Xie, Ruisheng Wang, Weixi Wang, Renzhong Guo
International Journal of Applied Earth Observation and Geoinformation, 2024
Siqi Du, Weixi Wang, Renzhong Guo, Ruisheng Wang, Yibin Tian and Shengjun Tang*
CVPR Workshop, 2024
Shengjun Tang, Yusong Li, Jiawei Wan, You Li, Baoding Zhou, Renzhong Guo, Weixi Wang, and Yuhong Feng
ISPRS Journal of Photogrammetry and Remote Sensing, 2024
Weixi Wang, Yaoyu Li, Hongsheng Huang, Linping Hong, Siqi Du, Linfu Xie, Xiaoming Li, Renzhong Guo and Shengjun Tang*
International Journal of Applied Earth Observation and Geoinformation, 2023
Baoding Zhou, Haoquan Mo, Shengjun Tang*, Xing Zhang, and Qingquan Li
IEEE Transactions on Geoscience and Remote Sensing, 2023
Shengjun Tang, Yunqi Feng, Junjie Huang, Xiaoming Li, Zhihan Lv, Yuhong Feng, and Weixi Wang
IEEE Transactions on Intelligent Transportation Systems, 2023
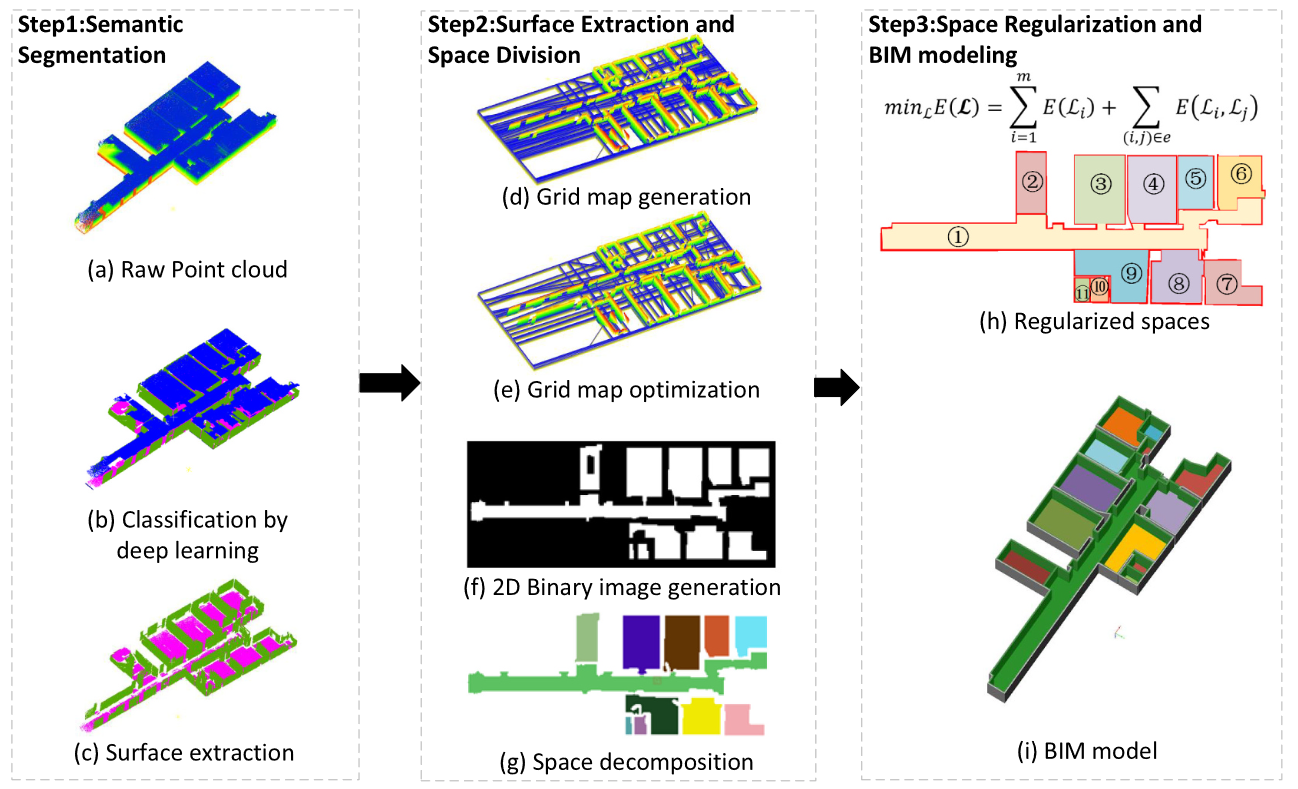
Shengjun Tang, Hongsheng Huang, Yunjie Zhang, Mengmeng Yao, Xiaoming Li, Linfu Xie, and Weixi Wang
Automation in Construction, 2023
Siqi Du, Hongsheng Huang, Fan He, Heng Luo, Yumeng Yin, Xiaoming Li, Linfu Xie, Renzhong Guo, Shengjun Tang*
International Journal of Applied Earth Observation and Geoinformation, 2023
Weixi Wang, Yuhang Fan, You Li, Xiaoming Li, Shengjun Tang*
IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023
Shengjun Tang, Xiaoming Li, Xianwei Zheng, Bo Wu, Weixi Wang, Yunjie Zhang
Automation In Construction, 2022
Lingfeng Liao, Shengjun Tang*, Jianghai Liao, Xiaoming Li, Weixi Wang, Yaxin Li, Renzhong Guo
Remote Sensing, 2022
Siqi Du, Shengjun Tang*, Weixi Wang, Xiaoming Li, Yonghua Lu, Renzhong Guo
ISPRS Annals, 2022
Linxi Huan, Xianwei Zheng, Shengjun Tang, Jianya Gong
ISPRS Journal of Photogrammetry and Remote Sensing, 2021
Zhilu Yuan, You Li,Shengjun Tang*, Ming Li, Renzhong Guo, Weixi Wang
Frontiers of Information Technology & Electronic Engineering, 2021
Shengjun Tang, Qing Zhu, You Li, Wu Chen, Bo Wu, Renzhong Guo, Xiaoming Li, Chisheng Wang, Weixi Wang
Photogrammetric Engineering & Remote Sensing, 2020
You Li, Weixi Wang, Xiaoming Li, Linfu Xie, Yankun Wang, Renzhong Guo, Wenqun Xiu, Shengjun Tang*
Remote Sensing, 2019
Shengjun Tang, Bo Wu, Qing Zhu
ISPRS Journal of Photogrammetry and Remote Sensing, 2016
Bo Wu, Shengjun Tang, Qing Zhu, Kwan-yuen Tong, Han Hu, Guoyuan Li
ISPRS Journal of Photogrammetry and Remote Sensing, 2015

三维场景图生成与交互

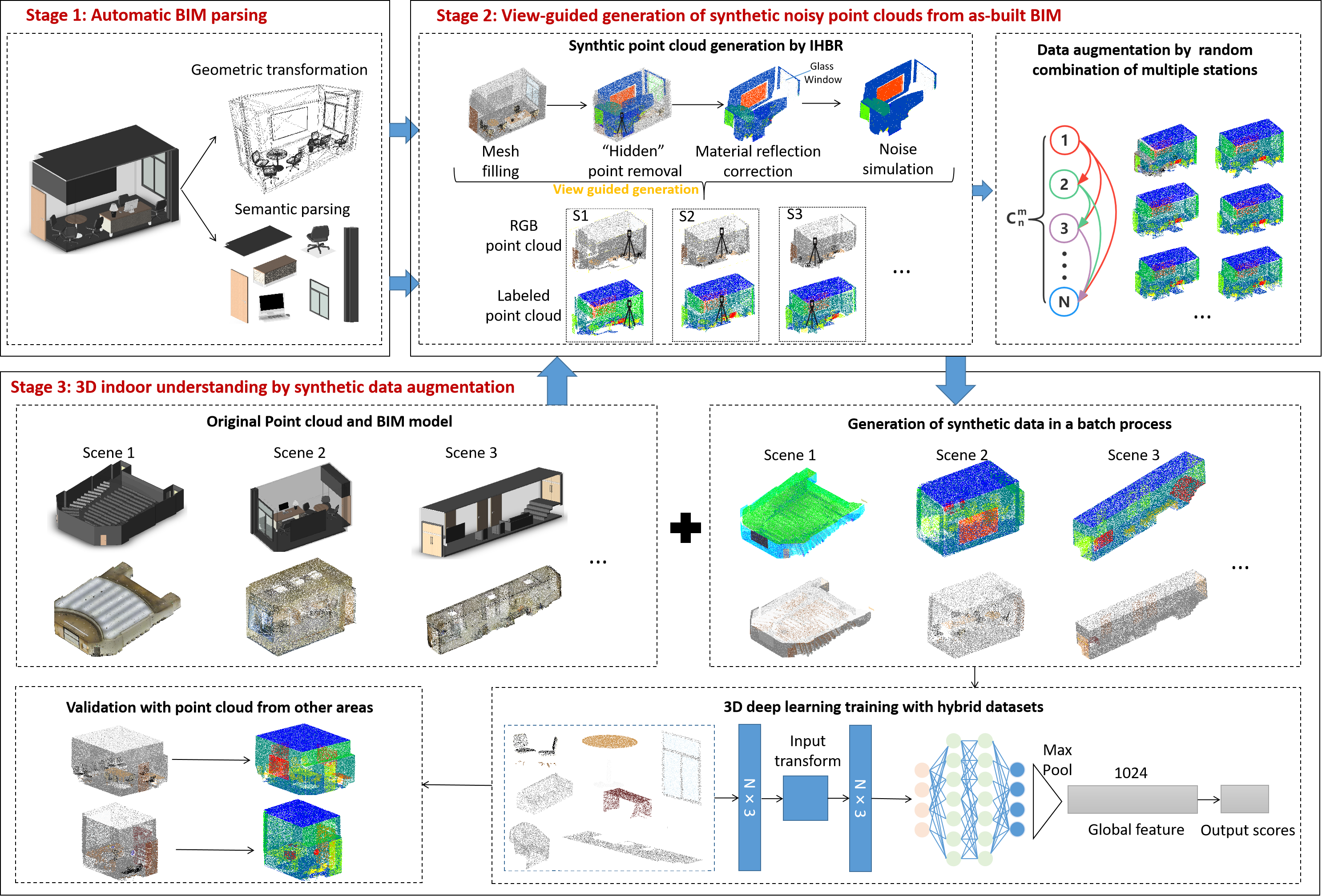
点云室内语义理解与重建
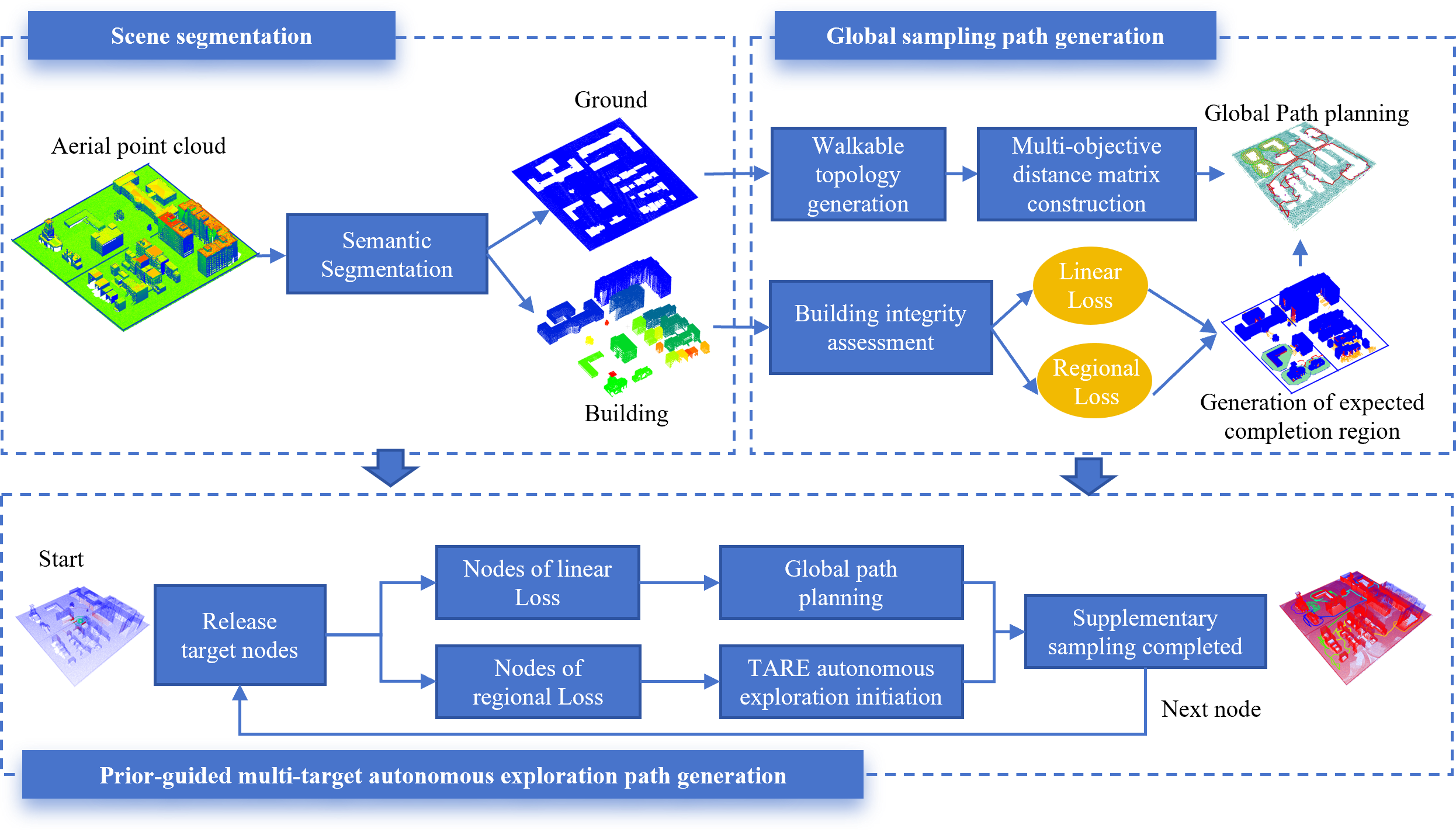
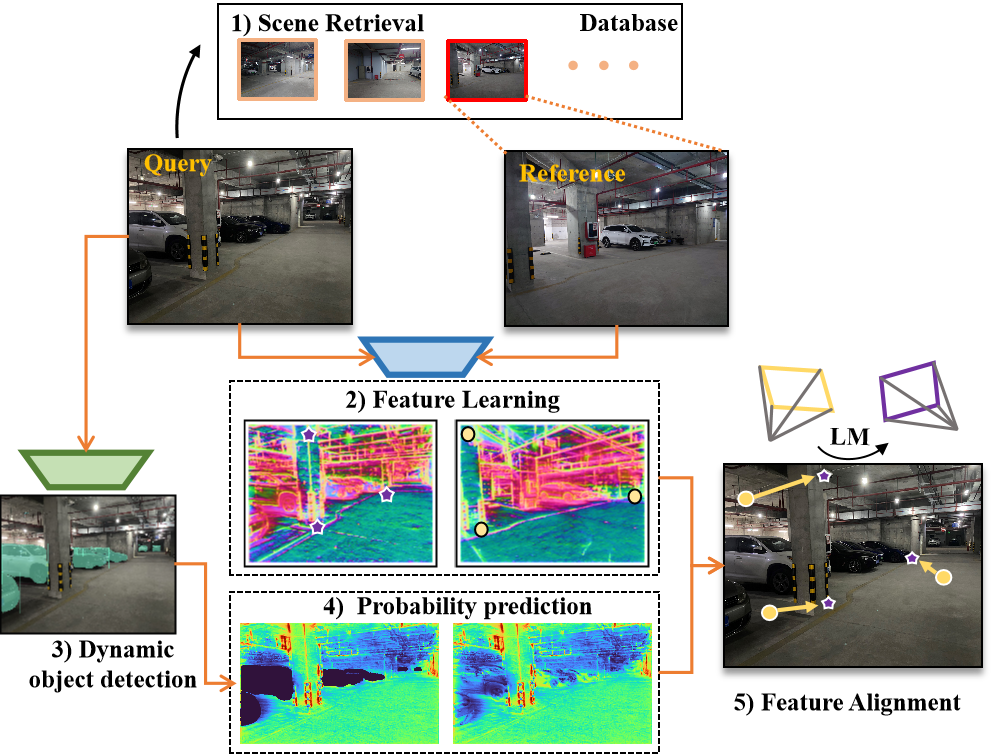
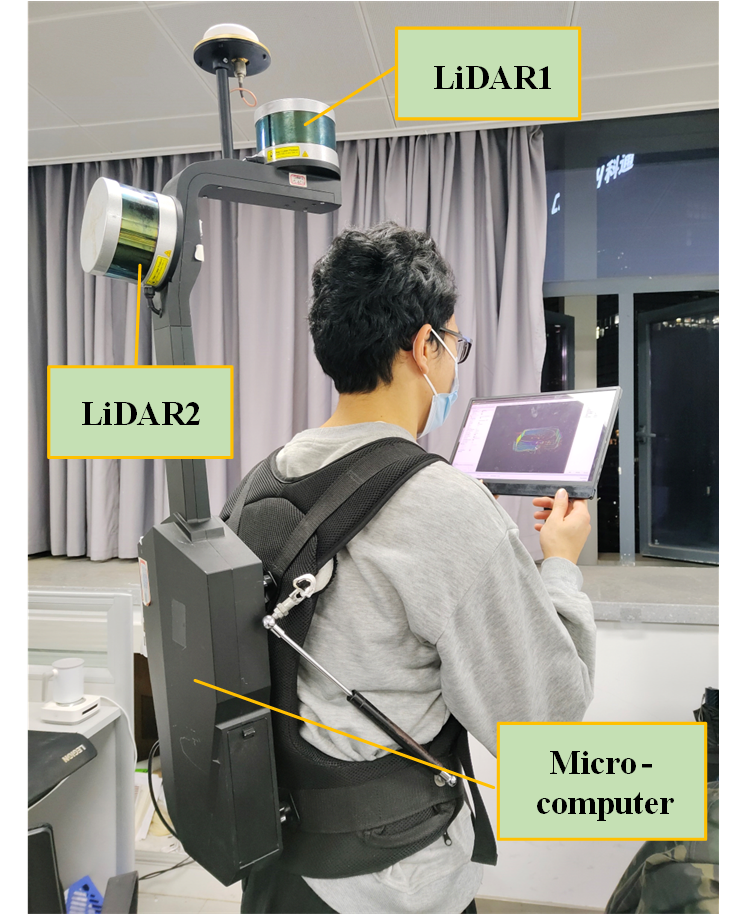
自主导航系统设计

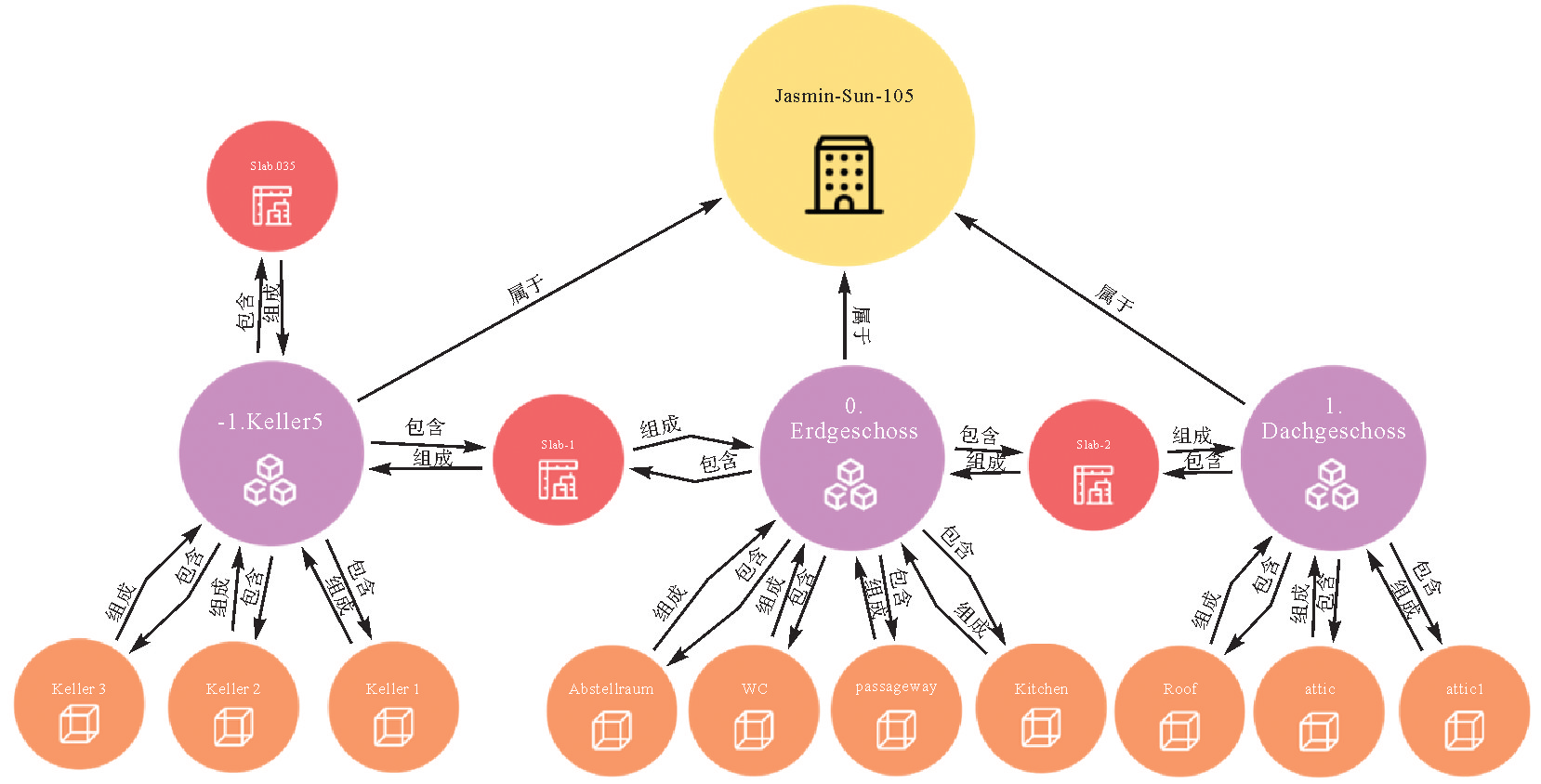
城市三维场景图构建

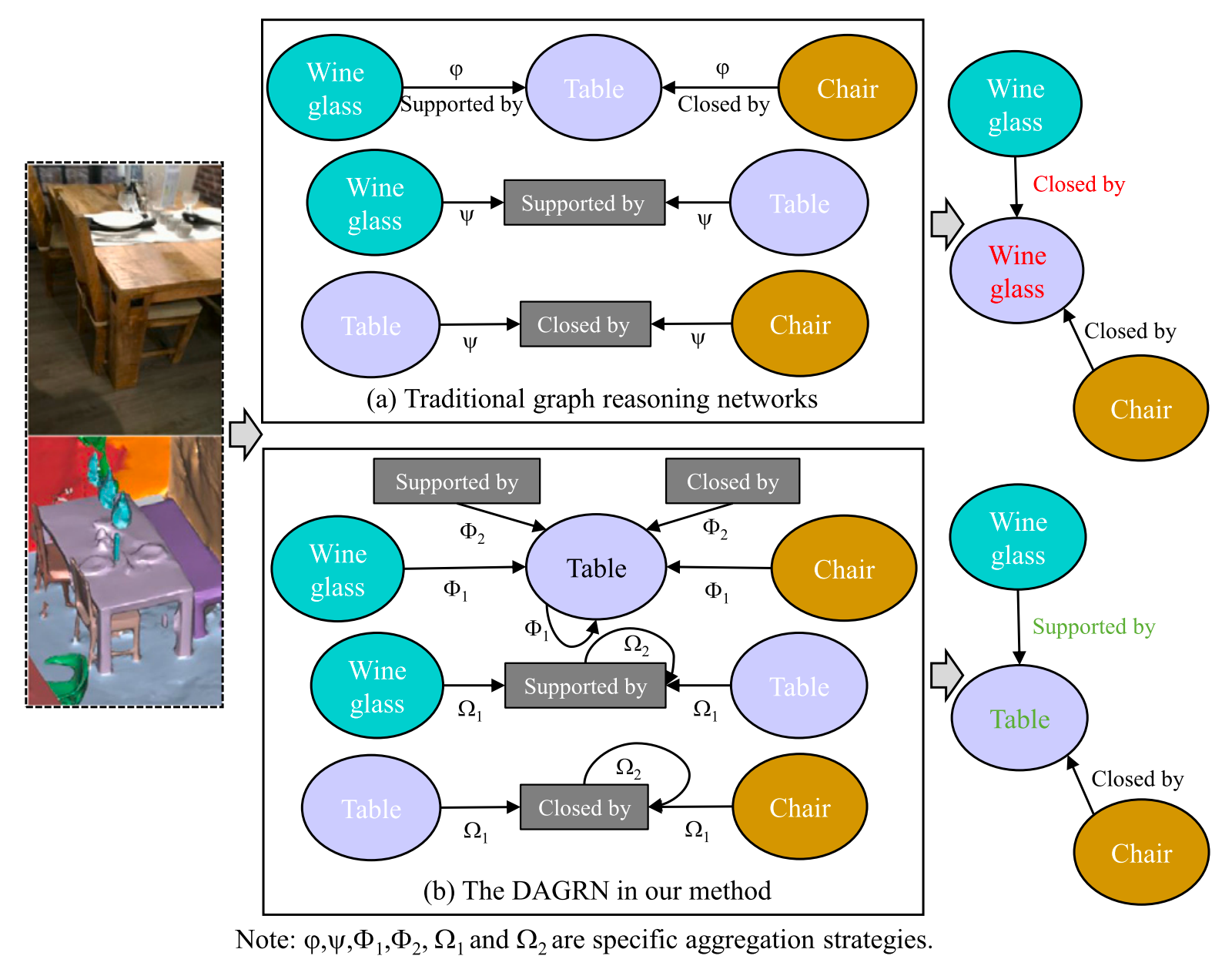
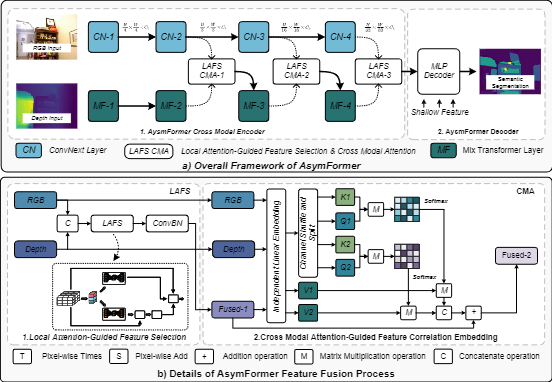
场景图生成

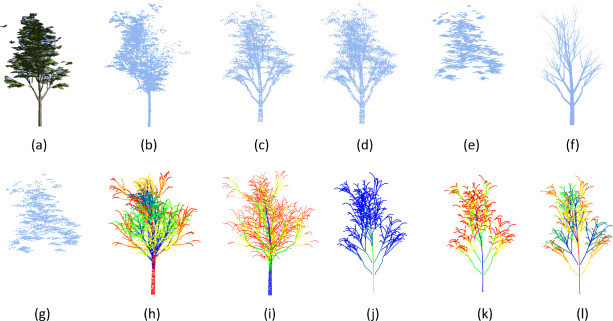
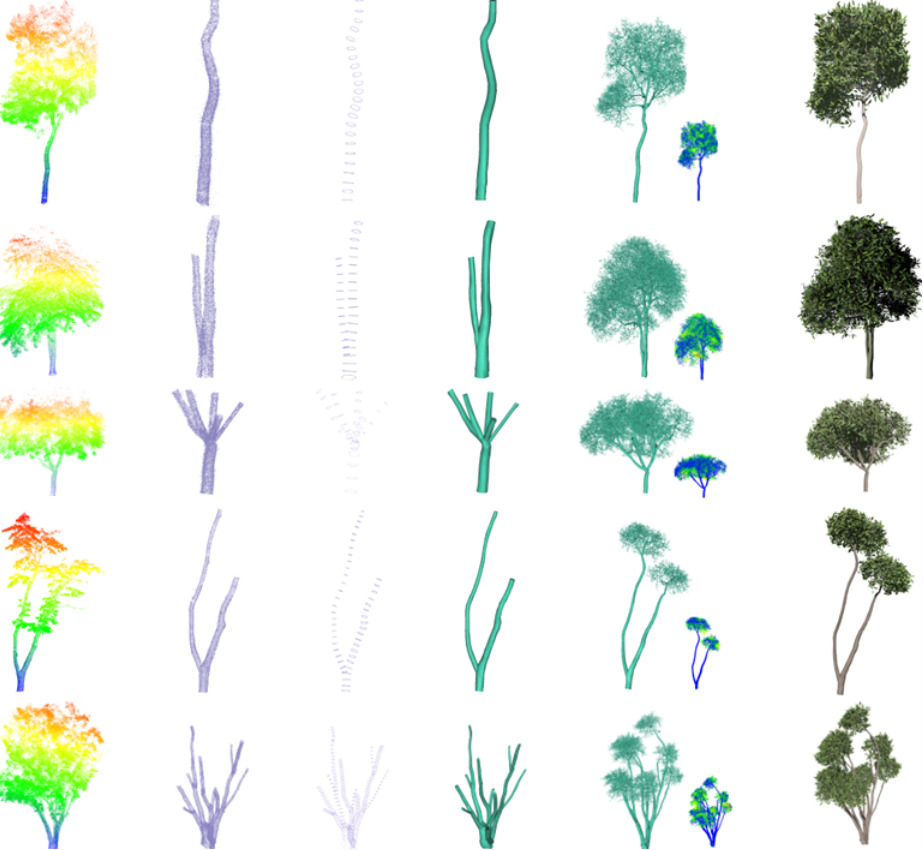
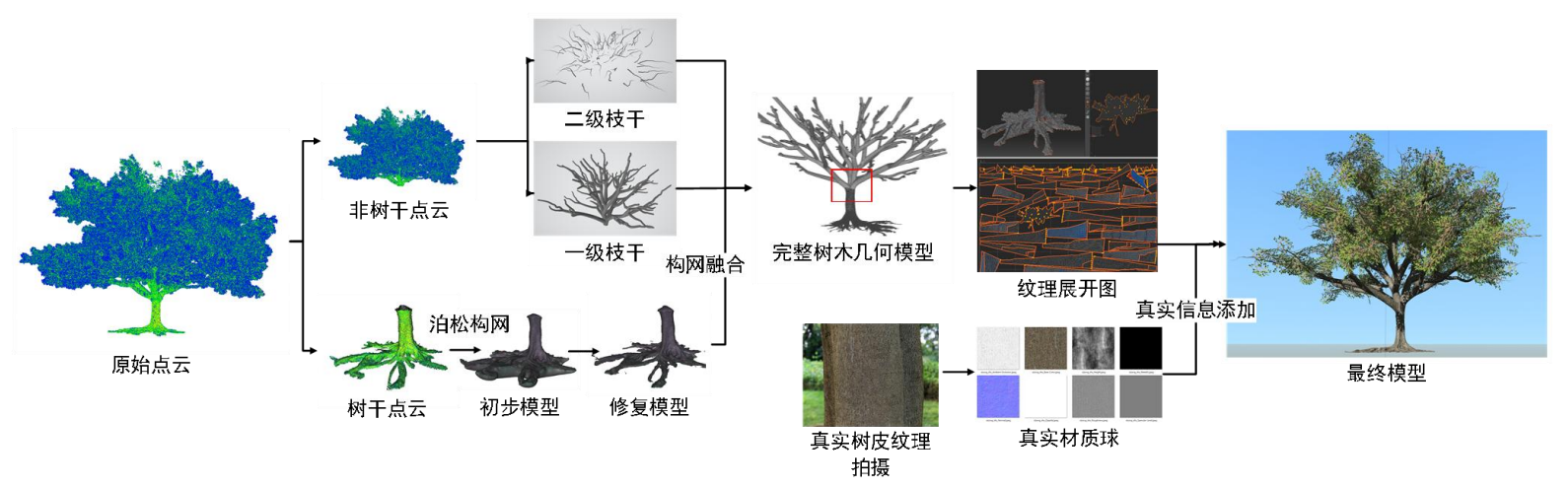
三维树木重建

空间智能体

三维场景理解
BIM场景图生成

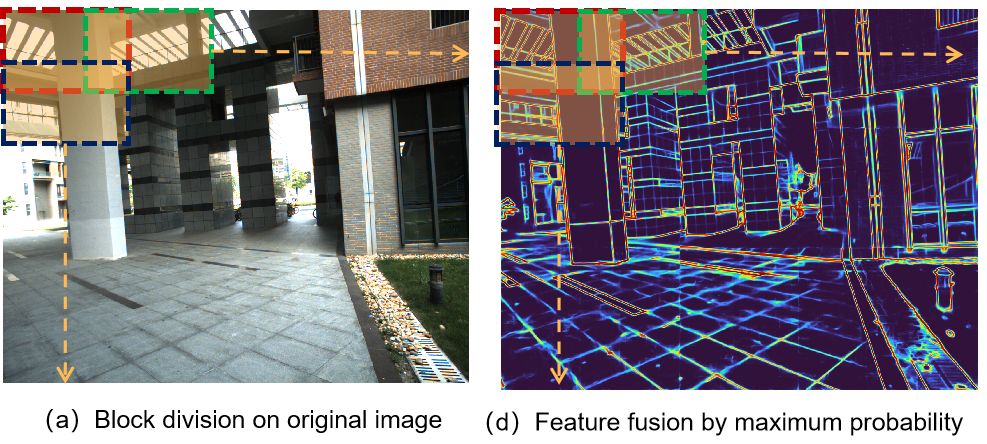
多模态室内场景图

3DGS建筑重建

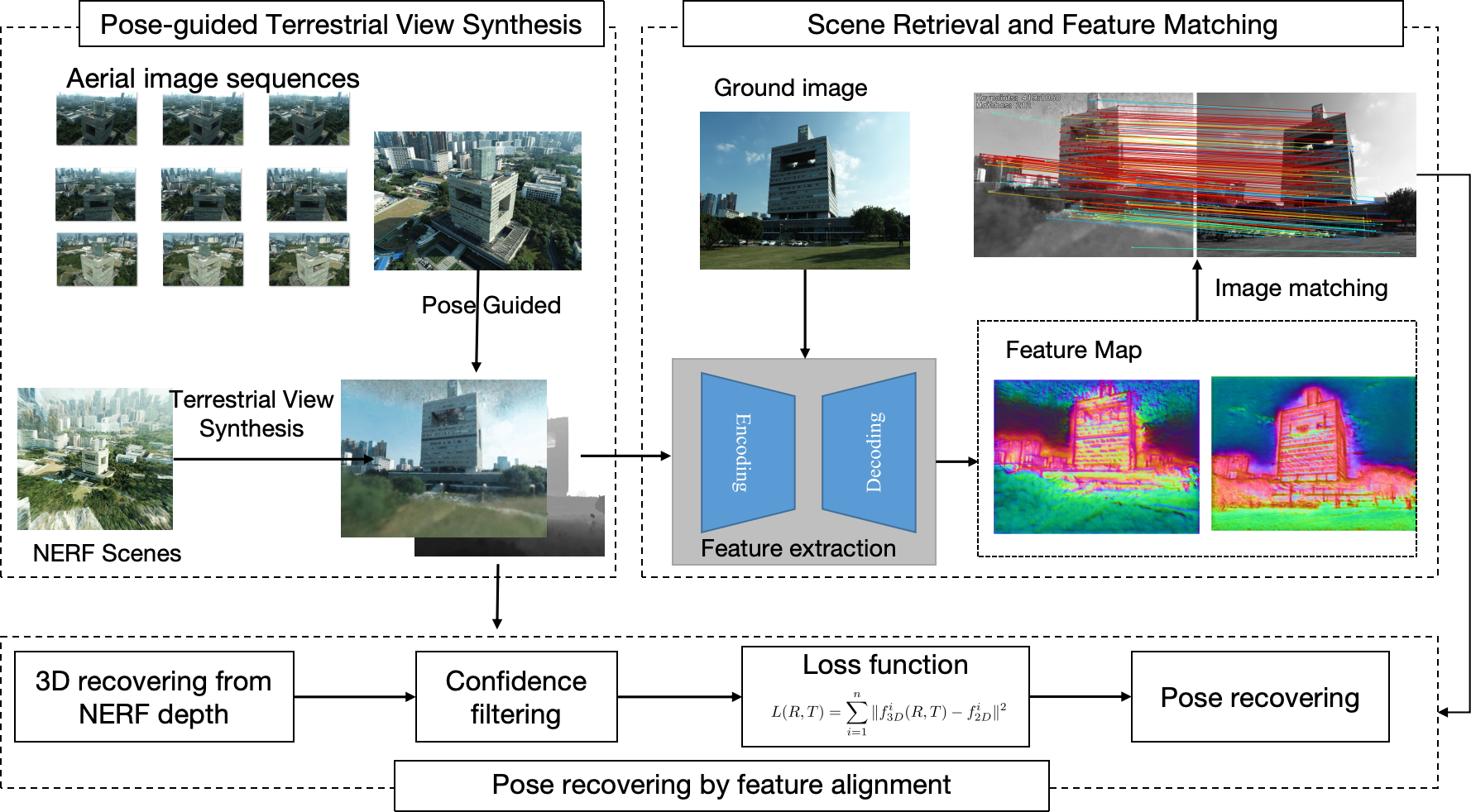
跨视角3DGS生成

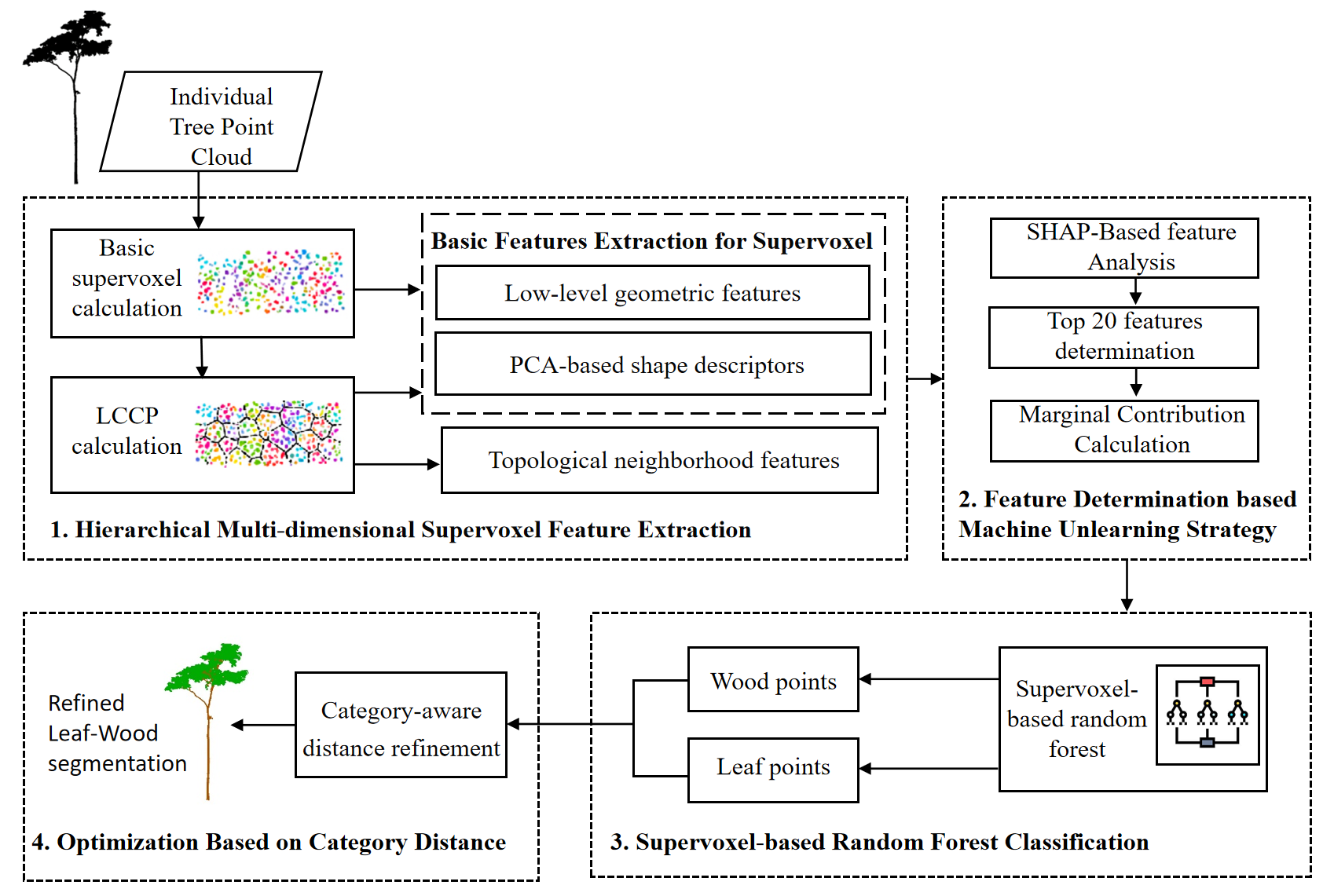
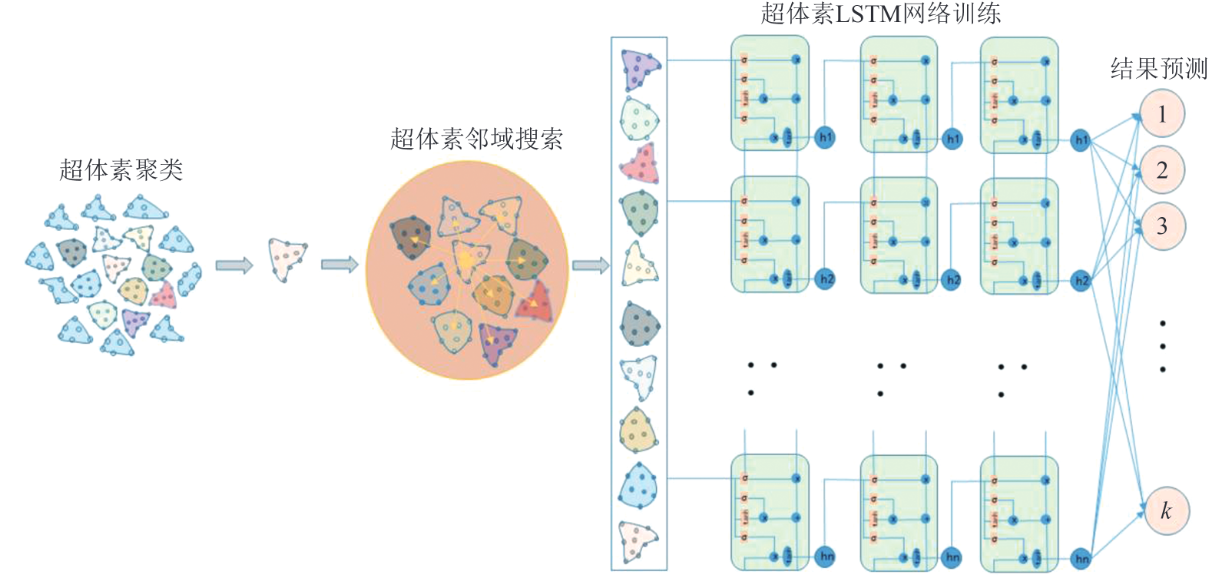
树木点云叶木分离

多源点云融合

多源点云融合
陈宇杰 (2022级硕士) - 深圳大学
李曜宇 (2022级硕士) - 华东师范大学读博
敖卓瑜 (2022级硕士) - 公务员
杜涵 (2022级硕士) - 比亚迪
黄鸿盛 (2021级硕士) - 香港理工大学读博
杜思齐 (2021级硕士) - 北京大学读博
冯宇祺 (2021级硕士) - 腾讯
李雨松 (2021级硕士) - 万科集团
范宇航 (2020级硕士) - 比亚迪
姚萌萌 (2019级硕士) - 光明实验室
邓媛媛 (2018级硕士) - 51 World
王敬淳 (2019级硕士) - 高校教师
黎施彬 (2022级硕士) - 多模态增强的城市三维场景图构建
罗建军 (2023级硕士) - 实时三维高斯重建
姜嘉鑫 (2022级硕士) - 点云实例化分割
宋锦阳 (2018级硕士) - 几何约束的室内点云平面要素提取与重建方法
万嘉威 (2020级本科) - 香港理工大学深造
廖凌枫 (2018级本科) - 东京大学读博
黄鸿盛 (2017级本科) - 香港理工大学深读博
叶致煌 (2017级本科) - 深圳迈嘉城科信息科技有限公司
本科生课程
本课程旨在教授C++编程语言的基础与高级特性,培养学生利用C++解决复杂工程问题的能力,为后续专业课程打下坚实的编程基础。
本科生课程
本课程旨在教授地理信息系统基本原理、方法及应用相关内容,培养学生利用GIS解决复杂空间分析问题的能力。
研究生课程
深入探讨激光雷达原理、方法与应用技术。课程讲解与学生讲述结合,培养学生应用激光雷达进行数据处理与分析计算的综合能力。
研究生课程
深入智能化测绘技术原理与方法,及其在各个领域的智能化应用。课程讲解与学生讲述结合,让学生系统了解智能化测绘领域前沿领域的研究现状。

第九届中国激光雷达大会
武汉, 2025年9月26-28日. 汤圣君获得第三届激光雷达青年科学家奖并作“空地跨视角协同定位与优化测图研究”特邀报告,李寒雨作“生成式视角增强与深度补偿的倾斜模型精细重建”报告,史博航博士参会。
第九届数字孪生与智能制造服务学术会议
成都, 2025年6月. 作“城市空间认知场景图智能构建研究”专题报告。

第十届全国虚拟地理环境学术会议 (CVGE2025)
南京, 2025年5月. 作“空地跨视角协同定位与优化测图研究”专题报告。
粤港澳高校联盟2024年青年学者论坛
珠海, 2024年11月. 受邀作“空地跨视角协同定位与优化测图研究”专题报告。
第八届全国激光雷达大会
桂林, 2024年11月. 担任专题召集人, 并作“室内点云三维场景图智能构建”报告。

第十九届GIS理论与方法年会
西安, 2024年10月. 担任专题召集人, 并作“场景图和多LLM Agent协同的机器智能交互方法”报告。

香港测量师学会持续专业发展(CPD)报告
香港, 2024年7月. 受邀作“城市植被数字孪生场景智能构建探索”学术报告。

香港地政总署 "CSDI发展空间数据标准框架" 项目汇报研讨会
香港, 2024年6月. 作为内地专家就“内地SDI发展及潜在数据应用”发表演讲。
ISPRS国际摄影测量与遥感学会会议
长沙, 2024年5月. 团队论文荣获最佳论文奖。

2023非暴露空间国际学术论坛
香港, 2023年12月. 团队论文荣获最佳论文奖。
中国科学院空天技术研究院
北京, 2023年12月. 作“面向数字孪生的城市场景感知与建模关键技术研究”专题学术报告。

摄影测量与遥感2023学术年会
上海, 2023年10月. 作“面向植被要素实景建模的大规模三维仿真树木数据集及应用”报告。

第七届全国激光雷达大会
2023年10月. 作为专题主席并作“室内高精度视觉位姿估计与AR导航”报告。

ISPRS Geospatial Week 2023
开罗, 埃及, 2023年9月.
第九届全国虚拟地理环境大会
延吉, 2023年8月. 作为专题召集人并作报告,指导研究生获创新大赛特等奖。